Ядро Linux 4.4
Документ содержит описание основных подсистем и драйверов ядра Linux, реализованных для поддержки аппаратуры СнК 1892ВМ14Я и модулей на базе СнК.
Ядро Linux поддерживает модули следующих ревизий:
Салют-ЭЛ24Д1 r1.3;
Салют-ЭЛ24Д1 r1.4;
Салют-ЭЛ24Д1 r1.5;
Салют-ЭЛ24Д1 r1.5 с установленным навигационным радиомодулем RF2Chan v2;
Салют-ЭЛ24Д2 r1.1;
Салют-ЭЛ24ОМ1 r1.1 с установленным Салют-ЭЛ24ПМ1 r1.1, r1.2;
Салют-ЭЛ24ОМ1 r1.2 с установленным Салют-ЭЛ24ПМ1 r1.2, Салют-ЭЛ24ПМ2 r1.0, r1.1, r1.2.
Файлы DTS *.dtsi, *.dts расположены в дереве исходных кодов U-Boot arch/arm/dts/*.dts*.
Пути до прочих файлов приведены относительно корня дерева исходных кодов Linux.
Подсистема управления тактовыми сигналами
Управление тактовыми сигналами и частотами в ядре Linux реализовано с использованием
Common Clock Framework.
Тактовые сигналы микросхемы описаны в виде дерева в файле mcom02.dtsi.
Для управления тактовыми сигналами и частотами используются следующие драйверы, описанные в
drivers/clk/elvees/clk-mcom.c:
mcom-clk-gate;mcom-clk-divider;mcom-clk-mux;mcom-clk-pll;mcom-cmctr.
Для корректного управления тактовыми сигналами каждый драйвер устройства, входящий в состав ядра Linux, должен реализовывать:
При инициализации драйвера:
Захват необходимого для устройства тактового сигнала, используя функцию
clk_get().Включение тактового сигнала, используя функцию
clk_enable().
При удалении драйвера:
Выключение тактового сигнала, используя функцию
clk_disable().
При инициализации подсистемы управления тактовыми сигналами происходит начальная настройка всех
PLL и делителей частот микросхемы. Устанавливаемые при инициализации значения множителей PLL и
делителей частот описаны в файле mcom02.dtsi.
Драйвер контроллера SPI dw_spi_mmio
Драйвер dw_spi_mmio управляет контроллерами SPI0 и SPI1 СнК 1892ВМ14Я.
Драйвер поддерживает следующие возможности:
Работа в режиме ведущего устройства.
Использование GPIO в качестве сигналов CS.
Настройка работы контроллера: фазы (CPHA) и полярности (CPOL) сигнала SCK, полярности сигнала CS (при использовании GPIO в качестве CS).
Поддержка слов длиной 8 и 16 бит.
Управление скоростью передачи в зависимости от ведомого устройства.
Ограничения драйвера:
Не поддерживается передача данных с помощью DMA.
Не поддерживается передача слов данных младшим битом вперед.
Драйвер контроллера PWM pwm-mcom
Драйвер pwm-mcom управляет контроллером PWM 1892ВМ14Я. Драйвер реализует стандартный интерфейс PWM
Файл с исходным кодом драйвера — drivers/pwm/pwm-mcom.c.
Описание DTS bindings представлено в файле
Documentation/devicetree/bindings/pwm/elvees,mcom-pwm.txt.
Ограничения драйвера:
Не реализовано управление каналами OUTB.
Не поддерживается режим счёта PWM-контроллера (PWM API не поддерживает данный режим).
Не реализовано управление предделителем.
Драйвер контроллера дисплея vpout-drm
Данный раздел применим к драйверу контроллера дисплея VPOUT СнК 1892ВМ14Я для подсистемы DRM — vpout-drm.
Документация, описывающая текущую версию подсистемы DRM, доступна по ссылке Linux GPU Driver Developer’s Guide.
Исходный код драйвера содержится в директории drivers/gpu/drm/vpout.
На рисунке Рис. 1 представлена диаграмма зависимостей компонентов драйвера Direct Rendering Manager (DRM).
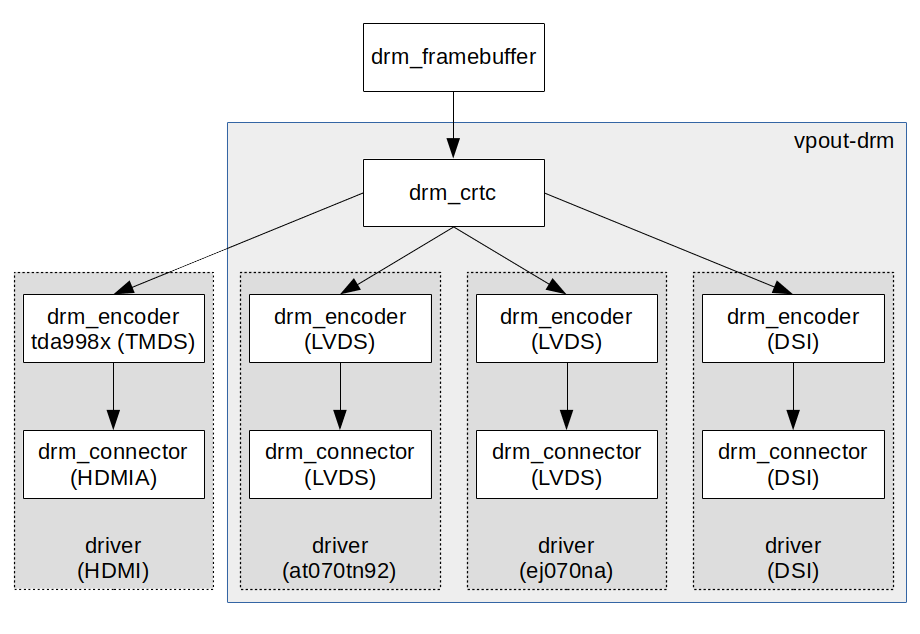
Рис. 1 Диаграмма зависимостей компонентов драйвера DRM
Драйвер обеспечивает следующие возможности:
Разрешение экрана до 1920x1080 пикселей;
Поддержка внешнего HDMI передатчика NXP TDA998x;
Поддержка внешних панелей с заданием параметров дисплея через DTS;
Чтение Extended Display Identification Data (EDID);
Эмуляция фреймбуфера через устройство
/dev/fb0.
Ограничения драйвера:
Не поддерживаются чересстрочные видеорежимы (не поддерживаются контроллером дисплея VPOUT);
Не поддерживаются HDMI передатчики отличные от NXP TDA998x;
Не реализована поддержка абстракции плоскостей (plane abstraction);
Не поддерживается атомарная установка видеорежима.
Экспериментальные возможности драйвера, функционал не проверялся на аппаратуре:
Поддержка DSI-дисплеев:
Не поддерживается MIPI Display Command Set (MIPI DCS) и Extended Display Identification Data (EDID) DSI-дисплеев, т.к. MIPI DCS не поддерживается в аппаратуре;
Фиксированные параметры дисплея (разрешение, FPS) считываются из DTS. Дополнительно в командной строке ядра должно быть указано разрешение и тип DSI-дисплея;
В коде драйвера фиксировано количество DSI-линий — 4.
При использовании в качестве устройства вывода HDMI монитора драйвер устанавливает оптимальный для подключенного монитора видеорежим, определяемый по EDID. С помощью параметров ядра (kernel parameters) возможно установить фиксированный видеорежим. Например, следующая строка задает разрешение экрана в 1280×720 пикселей:
video=HDMI-A-1:1280x720
При использовании в качестве устройства вывода DSI-дисплея драйвер устанавливает видеорежим заданный с помощью параметров ядра (kernel parameters). При этом параметры дисплея считываются из DTS. Например, следующая строка задает разрешение экрана в 1280×720 пикселей:
video=DSI:1280x720
Подробное описание параметров ядра, задающих видеорежим, содержится в документе
Documentation/fb/modedb.txt.
Драйвер фреймбуфера vpoutfb
Для вывода на экран графического окружения на СнК используется подсистема
FBDev
и драйвер vpoutfb. Директория с исходным кодом драйвера — drivers/video/fbdev/vpoutfb.
Драйвер управляет контроллером VPOUT и HDMI-адаптером ITE IT66121.
Алгоритм работы драйвера:
Если в DTS в узле output присутствует свойство compatible=»ite,it66121», то выполнить настройку контроллера ITE IT66121, подключенного по I2C.
Считать из DTS видеорежим и настроить VPOUT для вывода в заданном видеорежиме.
Если в DTS отсутствует видеорежим или тайминги некорректны, или свойство output отсутствует, то настроить VPOUT для вывода в режиме 720p 60 FPS.
Вызов ioctl FBIOPUT_VSCREENINFO с заданием неподдерживаемого режима завершается с -EINVAL.
(Следовательно, вызов fbset завершится c ненулевым кодом возврата).
Поддерживаются следующие ioctl:
FBIOGET_VSCREENINFO;FBIOPUT_VSCREENINFO;FBIOGET_FSCREENINFO;FBIOGETCMAP;FBIOPUTCMAP;FBIOBLANK;VPOUTFB_GET_MEMORY_ID.
При появлении прерывания OUT_FIFO_INT блока VPOUT драйвер останавливает и переинициализирует VPOUT. При этом в dmesg печатается сообщение «Caught OUT_FIFO_INT, reinitializing VPOUT».
В драйвере не реализовано:
Чтение EDID HDMI-монитора и ограничение возможных разрешений согласно данным из EDID.
Остановка/запуск VPOUT при отключении/подключении HDMI-монитора.
Примечание
Т.к. автоматическое определение подключения HDMI-монитора отсутствует, драйвер может
быть выключен по умолчанию. Загрузка драйвера выполняется командой modprobe vpoutfb.
Примечание
Для управления видеорежимами может использоваться утилита fbset и файл fb.modes.
Драйвер считывает видеорежим из DTS в соответствии с описанием в
Documentation/devicetree/bindings/video/display-timing.txt.
В DTS-файле mcom02.dtsi описан формат цветовых компонентов
изображения, устанавливаемые при инициализации драйвера. Подробное описание полей узла устройства
VPOUT представлено в файле Documentation/devicetree/bindings/fb/vpoutfb.txt.
Примечание
Модуль vpoutfb используется консолью – перед выгрузкой модуля необходимо отключить консоль от драйвера:
echo 0 > /sys/class/vtconsole/vtcon1/bind
modprobe -r vpoutfb
Драйвер контроллера Ethernet arasan-gemac
Драйвер arasan-gemac управляет контроллером Ethernet Arasan GEMAC.
Драйвер реализует стандартный интерфейс network devices, описанный в
Documentation/networking/netdevices.txt.
Обработка RX-прерываний реализована с использованием интерфейса
NAPI.
Директория с исходным кодом драйвера — drivers/net/ethernet/arasan.
Драйвер поддерживает выполнение следующих операций из пространства пользователя:
Установка скорости (10/100/1000 Мб/с);
Установка дуплекса (full/half);
Установка уровня сообщений драйвера;
Установка MAC-адреса;
Чтение регистров контроллера Ethernet Arasan GEMAC утилитой ethtool;
Перезапуск автосогласования;
Проверка физического подключения;
Установка MTU кадра в диапазоне 68 – 3500 байт;
Отключение фильтрации пакетов (Promiscuous mode);
Включение приема всех multicast-пакетов (IFF_ALLMULTI);
Поддерживается фильтрация unicast-пакетов по MAC-адресу и multicast-пакетов по hash-таблице.
Примечание
Включение promiscuous mode повышает нагрузку на CPU.
Драйвер не поддерживает:
Управление паузой;
Чтение и запись EEPROM;
Wake-on-Lan;
Управление объединением прерываний.
Подсистема управления энергопотреблением
Подсистема управления энергопотреблением Linux определяет модели управления энергопотреблением (подробнее см. Device Power Management Basics):
System Sleep;
Runtime Power Management.
Модель System Sleep
В модели System Sleep определены состояния сна (подробнее см. System Power Management Sleep States):
Suspend-To-Idle (s2idle, freeze);
Standby, Power-On Suspend (shallow, standby);
Suspend-to-RAM (deep);
Suspend-to-disk (disk).
Поддерживаемые состояния сна:
Suspend-To-Idle;
Power-On Suspend.
Для энергосбережения в состоянии Power-On Suspend используются свойства драйверов:
поддержка приостановки (suspend) контроллера СнК в драйвере;
поддержка приостановки (suspend) контроллера внешнего интерфейса (приёмопередатчик CAN, Ethernet PHY, и т.д.) в драйвере;
поддержка CPU Hotplug (подробнее см. главу CPU Hotplug).
Поддержка приостановки реализована в драйверах контроллеров СнК:
avico (невозможен переход в Power-On Suspend во время сжатия);
delcore-30m;
designware-i2c;
designware-i2s;
dw-apb-gpio;
dw-apb-uart;
dw-wdt;
dwc2;
sdhci-mcom02.
Поддержка приостановки реализована в драйверах контроллеров внешних интерфейсов модулей на базе СнК:
bcm4329-fmac;
mcp2515;
ft313h.
Поддержка приостановки не реализована в драйверах контроллеров СнК:
arasan-gemac;
dw-apb-ssi;
dw-apb-timer;
mcom-pwm;
mfbsp-i2s;
nfc-v2p99;
pl330;
vinc;
vpout-drm;
vpoutfb.
Поддержка пробуждения (wakeup) реализована в драйверах:
dw-apb-uart (подробнее см. Пример пробуждения по событию от UART);
dw-apb-gpio;
rtc-ds1307 (подробнее см. Пример пробуждения по событию от RTC).
Пример пробуждения по событию от UART
Установить UART0 в качестве источника пробуждения:
echo enabled > /sys/devices/platform/38028000.serial/tty/ttyS0/power/wakeup
Перевести ОС в состояние сна:
echo freeze > /sys/power/state # enter Suspend-To-Idle state
или:
echo standby > /sys/power/state # enter Power-On Suspend state
В терминале на ПК отправить любой символ в приёмник контроллера UART0.
Пример пробуждения по событию от RTC
Перевести ОС в состояние сна до указанного времени пробуждения:
rtcwake -s 3 -m freeze # enter Suspend-To-Idle state
или:
rtcwake -s 3 -m standby # enter Power-On Suspend state
Модель Runtime Power Management
Для поддержки динамического управления энергопотреблением реализованы:
механизм CPU hotplug;
драйвер управления частотой ядер CPU cpufreq-dt.
Механизм CPU hotplug
Механизм CPU hotplug позволяет включать и выключать процессорные ядра, не перезагружая систему, что может использоваться:
для отключения CPU1;
для перехода системы в состояния сна.
Для выключения и включения процессорных ядер используются функции cpu_down() и cpu_up(),
описанные в файле kernel/cpu.c.
Использование через sysfs:
Для отключения питания ядра CPU1 необходимо выполнить:
echo 0 > /sys/devices/system/cpu/cpu1/online
Для включения питания ядра CPU1 необходимо выполнить:
echo 1 > /sys/devices/system/cpu/cpu1/online
Драйвер управления частотой ядер CPU cpufreq-dt
Штатный драйвер cpufreq-dt, позволяет управлять тактовой частотой ядер CPU0 и CPU1 через подсистему CPUfreq.
Директория с исходным кодом драйвера — drivers/cpufreq.
Список частот ядер CPU описан в DTS-файле mcom02.dtsi.
Описание DTS bindings представлено в файле
Documentation/devicetree/bindings/cpufreq/cpufreq-dt.txt.
Возможности драйвера:
Регуляторы масштабирования тактовой частоты ядер CPU (CPUfreq governors):
ondemand(по-умолчанию) — устанавливает тактовую частоту в зависимости от нагрузки на ядрах CPU;conservative— похож наondemand, но более экономный (предпочтение отдаётся меньшим тактовым частотам);performance— устанавливает тактовую частоту в максимальное значение;userspace— позволяет устанавливать частоту из пространства пользователя.
Управление регуляторами и частотами через
sysfs.
Ограничения драйвера:
Не поддерживается управление напряжением питания ядер CPU, т.к отсутствует поддержка в СнК.
Не поддерживается независимое управление частотой ядер CPU, т.к отсутствует поддержка в СнК.
Для установки тактовой частоты ядер из пространства пользователя необходимо:
Выбрать регулятор
userspace:echo userspace > /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
Выбрать частоту из поддерживаемых. Список частот доступен в файле
/sys/devices/system/cpu/cpu0/cpufreq/scaling_available_frequencies.Установить частоту. Значение частоты передаётся в кГц, например:
echo 312000 > /sys/devices/system/cpu/cpu0/cpufreq/scaling_setspeed
Подсистема UART в режиме RS-485
Для управления полудуплексными приёмопередатчиками RS-485 используются ioctl TIOCMBIS/TIOCMBIC:
int rts_flag = TIOCM_RTS;
ioctl(fd, TIOCMBIS, &rts_flag); // set send mode
ioctl(fd, TIOCMBIC, &rts_flag); // set receive mode
Примечание: модули Салют-ЭЛ24ОМ1 имеют полудуплексный приёмопередатчик RS-485.
Модуль dmatestcontig для тестирования SDMA
Модуль dmatestcontig не входит в состав исходных кодов Linux. Описание относится к модулю
dmatestcontig из коммита 4896f90a4cd335d91f5b9f2c1457f24baa7f98ce в репозитории модуля.
Модуль dmatestcontig основан на модуле
dmatest из коммита
9da2b1641a098eb9b00aacbfd7715efb6a503f7b в репозитории ядра Linux.
Модуль dmatestcontig позволяет провести тестирование SDMA с передачей данных, измерением производительности и проверкой правильности переданных данных. Управление SDMA осуществляется через DMA Engine API. Поддерживаемые типы передач: DMA_MEMCPY, DMA_XOR, DMA_PQ. Модуль поддерживает ряд параметров, которые позволяют задать размер буферов, количество повторений передач, максимальное число используемых каналов SDMA, количество потоков ядра, использующих канал SDMA, и др. Особенностью модуля dmatestcontig является то, что он позволяет выбрать типы передач, указывать специфические регионы памяти и включать частоты, которые, например, могут быть необходимы для обеспечения доступа к устройству памяти.
Модуль поддерживает все параметры, которые имеет модуль dmatest, а также добавляет параметры:
tests— типы выполняемых передач данных (по умолчанию выбраны все поддерживаемые типы передач);memregs— базовые адреса зарезервированных регионов памяти в DTS, в которые каналы SDMA должны адресовать запросы чтения/записи (по умолчанию регион выбирается автоматически);src— регионы памяти изmemregs, в которые каналы SDMA будут адресовать запросы чтения (по умолчанию первый регион, указанный вmemregs);dst— регионы памяти изmemregs, в которые каналы SDMA будут адресовать запросы записи (по умолчанию первый регион, указанный вmemregs);clocks— наименования узлов устройств в DTS, описывающих частоты, которых нужно включить, например, для обеспечения доступа SDMA к устройству памяти.
Параметр tests содержит битовую маску типов передач. Значение 1 бита включает тип передачи и
наоборот. Соответствие типов передач и номеров бит в параметре:
бит 0 — DMA_MEMCPY;
бит 1 — DMA_XOR;
бит 2 — DMA_PQ.
Резервирование регионов памяти в DTS выполняется согласно Reserved memory regions. Пример резервирования регионов памяти для модулей Салют-ЭЛ24ПМ:
reserved-memory {
#address-cells = <1>;
#size-cells = <1>;
ranges;
dmatestc_ddr0_reserved: dmatestc_ddr0@0x7f800000 {
no-map;
reg = <0x7f800000 0x800000>;
};
dmatestc_ddr1_reserved: dmatestc_ddr1@0xdf800000 {
no-map;
reg = <0xdf800000 0x800000>;
};
dmatestc_xyram_reserved: dmatestc_xyram@0x3a400000 {
no-map;
reg = <0x3a400000 0x40000>;
};
};
Элементы массивов src и dst ссылаются на регионы памяти по индексу региона в массиве
memregs. Номер канала SDMA, с которым ассоциируется регион, определяется индексом элемента в
src/dst.
Пример загрузки модуля с параметрами tests, src и dst:
modprobe dmatestcontig wait=1 run=1 noverify=1 tests=0x01 \
max_channels=5 memregs=0x7f800000,0xdf800000,0x3a400000 \
src=2,2,0,1,1 dst=0,0,2,2,1
modprobe -r dmatestcontig
В примере выше пять каналов SDMA адресуют запросы чтения/записи в регионы памяти следующим образом:
Канал 0: чтение из региона с базовым адресом 0x3a400000, запись в регион с адресом 0x7f800000.
Канал 1: чтение из региона с базовым адресом 0x3a400000, запись в регион с адресом 0x7f800000.
Канал 2: чтение из региона с базовым адресом 0x7f800000, запись в регион с адресом 0x3a400000.
Канал 3: чтение из региона с базовым адресом 0xdf800000, запись в регион с адресом 0x3a400000.
Канал 4: чтение из региона с базовым адресом 0xdf800000, запись в регион с адресом 0xdf800000.
Пример загрузки модуля с параметром clocks:
modprobe dmatestcontig run=1 noverify=1 memregs=0x7f800000,0x3a400000 \
src=0 dst=1 clocks="dsp_aclk"
modprobe -r dmatestcontig
В примере выше включается частота, описанная в узле устройства «dsp_aclk» в DTS, необходимая для обеспечения доступа к XYRAM.