Ядро Linux для 1892ВМ14Я. Руководство программиста¶
О документе¶
Документ содержит описание основных подсистем и драйверов ядра Linux, реализованных для поддержки аппаратуры СнК 1892ВМ14Я и модулей на базе СнК.
Ядро Linux поддерживает модули следующих ревизий:
- Салют-ЭЛ24Д1 r1.3;
- Салют-ЭЛ24Д1 r1.4;
- Салют-ЭЛ24Д1 r1.5;
- Салют-ЭЛ24Д1 r1.5 с установленным навигационным радиомодулем RF2Chan v2;
- Салют-ЭЛ24Д2 r1.1;
- Салют-ЭЛ24ОМ1 r1.1 с установленным Салют-ЭЛ24ПМ1 r1.1 или Салют-ЭЛ24ПМ1 r1.2;
- Салют-ЭЛ24ОМ1 r1.2 с установленным Салют-ЭЛ24ПМ1 r1.2, Салют-ЭЛ24ПМ2 r1.0 или Салют-ЭЛ24ПМ2 r1.1.
Файлы DTS *.dtsi, *.dts расположены в дереве исходных кодов U-Boot arch/arm/dts/*.dts*.
Пути до прочих файлов приведены относительно корня дерева исходных кодов Linux.
Подсистема управления тактовыми сигналами¶
Управление тактовыми сигналами и частотами в ядре Linux реализовано с использованием
Common Clock Framework.
Тактовые сигналы микросхемы описаны в виде дерева в файле mcom02.dtsi.
Для управления тактовыми сигналами и частотами используются следующие драйверы, описанные в
drivers/clk/elvees/clk-mcom.c:
mcom-clk-gate;mcom-clk-divider;mcom-clk-mux;mcom-clk-pll;mcom-cmctr.
Для корректного управления тактовыми сигналами каждый драйвер устройства, входящий в состав ядра Linux, должен реализовывать:
- При инициализации драйвера:
- Захват необходимого для устройства тактового сигнала, используя функцию
clk_get(). - Включение тактового сигнала, используя функцию
clk_enable().
- Захват необходимого для устройства тактового сигнала, используя функцию
- При удалении драйвера:
- Выключение тактового сигнала, используя функцию
clk_disable().
- Выключение тактового сигнала, используя функцию
При инициализации подсистемы управления тактовыми сигналами происходит начальная настройка всех
PLL и делителей частот микросхемы. Устанавливаемые при инициализации значения множителей PLL и
делителей частот описаны в файле mcom02.dtsi.
Драйвер контроллера SPI dw_spi_mmio¶
Драйвер dw_spi_mmio управляет контроллерами SPI0 и SPI1 СнК 1892ВМ14Я.
Драйвер поддерживает следующие возможности:
- Работа в режиме ведущего устройства.
- Использование GPIO в качестве сигналов CS.
- Настройка работы контроллера: фазы (CPHA) и полярности (CPOL) сигнала SCK, полярности сигнала CS (при использовании GPIO в качестве CS).
- Поддержка слов длиной 8 и 16 бит.
- Управление скоростью передачи в зависимости от ведомого устройства.
Ограничения драйвера:
- Не поддерживается передача данных с помощью DMA.
- Не поддерживается передача слов данных младшим битом вперед.
Драйвер контроллера PWM pwm-mcom¶
Драйвер pwm-mcom управляет контроллером PWM 1892ВМ14Я. Драйвер реализует стандартный интерфейс PWM
Файл с исходным кодом драйвера — drivers/pwm/pwm-mcom.c.
Описание DTS bindings представлено в файле
Documentation/devicetree/bindings/pwm/elvees,mcom-pwm.txt.
Ограничения драйвера:
- Не реализовано управление каналами OUTB.
- Не поддерживается режим счёта PWM-контроллера (PWM API не поддерживает данный режим).
- Не реализовано управление предделителем.
Драйвер контроллера дисплея vpout-drm¶
Данный раздел применим к драйверу контроллера дисплея VPOUT СнК 1892ВМ14Я для подсистемы DRM — vpout-drm.
Документация, описывающая текущую версию подсистемы DRM, доступна по ссылке Linux GPU Driver Developer’s Guide.
Исходный код драйвера содержится в директории drivers/gpu/drm/vpout.
На рисунке 10 представлена диаграмма зависимостей компонентов драйвера Direct Rendering Manager (DRM).
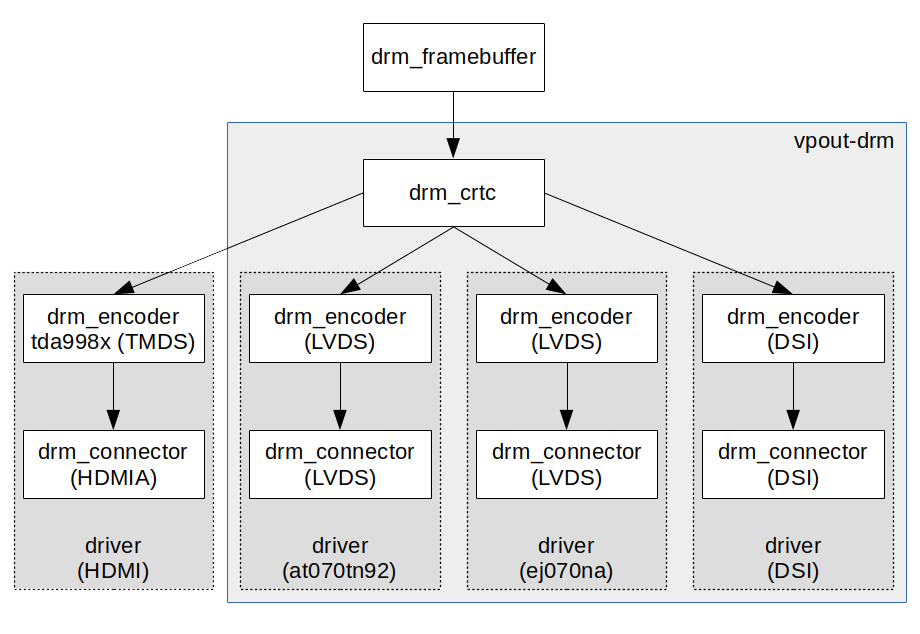
10 Диаграмма зависимостей компонентов драйвера DRM
Драйвер обеспечивает следующие возможности:
- Разрешение экрана до 1920x1080 пикселей;
- Поддержка внешнего HDMI передатчика NXP TDA998x;
- Поддержка внешних панелей с заданием параметров дисплея через DTS;
- Чтение Extended Display Identification Data (EDID);
- Эмуляция фреймбуфера через устройство
/dev/fb0.
Ограничения драйвера:
- Не поддерживаются чересстрочные видеорежимы (не поддерживаются контроллером дисплея VPOUT);
- Не поддерживаются HDMI передатчики отличные от NXP TDA998x;
- Не реализована поддержка абстракции плоскостей (plane abstraction);
- Не поддерживается атомарная установка видеорежима.
Экспериментальные возможности драйвера, функционал не проверялся на аппаратуре:
- Поддержка DSI-дисплеев:
- Не поддерживается MIPI Display Command Set (MIPI DCS) и Extended Display Identification Data (EDID) DSI-дисплеев, т.к. MIPI DCS не поддерживается в аппаратуре;
- Фиксированные параметры дисплея (разрешение, FPS) считываются из DTS. Дополнительно в командной строке ядра должно быть указано разрешение и тип DSI-дисплея;
- В коде драйвера фиксировано количество DSI-линий — 4.
При использовании в качестве устройства вывода HDMI монитора драйвер устанавливает оптимальный для подключенного монитора видеорежим, определяемый по EDID. С помощью параметров ядра (kernel parameters) возможно установить фиксированный видеорежим. Например, следующая строка задает разрешение экрана в 1280×720 пикселей:
video=HDMI-A-1:1280x720
При использовании в качестве устройства вывода DSI-дисплея драйвер устанавливает видеорежим заданный с помощью параметров ядра (kernel parameters). При этом параметры дисплея считываются из DTS. Например, следующая строка задает разрешение экрана в 1280×720 пикселей:
video=DSI:1280x720
Подробное описание параметров ядра, задающих видеорежим, содержится в документе
Documentation/fb/modedb.txt.
Драйвер фреймбуфера vpoutfb¶
Для вывода на экран графического окружения на СнК используется подсистема
FBDev
и драйвер vpoutfb. Директория с исходным кодом драйвера — drivers/video/fbdev/vpoutfb.
Драйвер управляет контроллером VPOUT и HDMI-адаптером ITE IT66121.
Алгоритм работы драйвера:
- Если в DTS в узле output присутствует свойство compatible=»ite,it66121», то выполнить настройку контроллера ITE IT66121, подключенного по I2C.
- Считать из DTS видеорежим и настроить VPOUT для вывода в заданном видеорежиме.
- Если в DTS отсутствует видеорежим или тайминги некорректны, или свойство output отсутствует, то настроить VPOUT для вывода в режиме 720p 60 FPS.
Вызов ioctl FBIOPUT_VSCREENINFO с заданием неподдерживаемого режима завершается с -EINVAL.
(Следовательно, вызов fbset завершится c ненулевым кодом возврата).
Поддерживаются следующие ioctl:
FBIOGET_VSCREENINFO;FBIOPUT_VSCREENINFO;FBIOGET_FSCREENINFO;FBIOGETCMAP;FBIOPUTCMAP;FBIOBLANK;VPOUTFB_GET_MEMORY_ID.
При появлении прерывания OUT_FIFO_INT блока VPOUT драйвер останавливает и переинициализирует VPOUT. При этом в dmesg печатается сообщение «Caught OUT_FIFO_INT, reinitializing VPOUT».
В драйвере не реализовано:
- Чтение EDID HDMI-монитора и ограничение возможных разрешений согласно данным из EDID.
- Остановка/запуск VPOUT при отключении/подключении HDMI-монитора.
Примечание
Т.к. автоматическое определение подключения HDMI-монитора отсутствует, драйвер может
быть выключен по умолчанию. Загрузка драйвера выполняется командой modprobe vpoutfb.
Примечание
Для управления видеорежимами может использоваться утилита fbset и файл fb.modes.
Драйвер считывает видеорежим из DTS в соответствии с описанием в
Documentation/devicetree/bindings/video/display-timing.txt.
В DTS-файле mcom02.dtsi описан формат цветовых компонентов
изображения, устанавливаемые при инициализации драйвера. Подробное описание полей узла устройства
VPOUT представлено в файле Documentation/devicetree/bindings/fb/vpoutfb.txt.
Примечание
Модуль vpoutfb используется консолью – перед выгрузкой модуля необходимо отключить консоль от драйвера:
echo 0 > /sys/class/vtconsole/vtcon1/bind
modprobe -r vpoutfb
Драйвер VPU avico¶
Общие сведения¶
Драйвер avico управляет VPU VELcore-01 и реализует аппаратное кодирование и декодирование видео по стандарту H.264. Драйвер реализован с использованием подсистемы V4L2 и предоставляет стандартный программный интерфейс для кодирования/декодирования и управления.
Кодирование видео¶
Поддерживается входное несжатое видео с форматом пикселей M420.
Максимальная ширина кадра — 1920 пикселей.
Максимальная высота кадра — 4096 пикселей.
Поддержка кодирования видео с разрешением кратным 2 по ширине и высоте.
Возможность установки FPS видеопотока.
Возможность установки параметра QP с помощью контролов:
- V4L2_CID_MPEG_VIDEO_H264_I_FRAME_QP;
- V4L2_CID_MPEG_VIDEO_H264_P_FRAME_QP;
- V4L2_CID_MPEG_VIDEO_H264_CHROMA_QP_INDEX_OFFSET.
Возможность установки IDR-кадра с помощью контрола V4L2_CID_MPEG_VIDEO_FORCE_KEY_FRAME.
Возможность установки размера GOP с помощью контрола V4L2_CID_MPEG_VIDEO_GOP_SIZE. Новый размер GOP применяется со следующего IDR-кадра после завершения текущего GOP. Чтобы применить новый размер GOP на следующем кадре, нужно запросить IDR-кадр с помощью контрола V4L2_CID_MPEG_VIDEO_FORCE_KEY_FRAME.
Поддержка более одного потока кодирования видео. Максимальное число поддерживаемых потоков кодирования зависит от ширины и высоты кадра, количества запрошенных V4L2-буферов и объема памяти, которая может быть выделена с помощью Contiguous Memory Allocator (CMA). Теоретическое максимальное число поддерживаемых потоков кодирования можно вычислить с помощью формулы:

где M — размер памяти, которая может быть выделена с помощью CMA, W — ширина кадра, H — высота кадра,
 — количество V4L2-буферов
output-интерфейса,
— количество V4L2-буферов
output-интерфейса,
 — количество V4L2-буферов
capture-интерфейса.
Дополнительно количество потоков n ограничивается фрагментацией CMA.
Производительность кодирования каждого видео понижается с увеличением числа потоков, т.к.
используется один аппаратный поток кодирования. Пример реального максимального числа потоков и
достигаемой при этом производительности кодирования при QP 23, четырех V4L2-буферов
output-интерфейса, четырех V4L2-буферов capture-интерфейса, размере CMA-памяти 128 МБ и частоте
VPU 312 МГц:
— количество V4L2-буферов
capture-интерфейса.
Дополнительно количество потоков n ограничивается фрагментацией CMA.
Производительность кодирования каждого видео понижается с увеличением числа потоков, т.к.
используется один аппаратный поток кодирования. Пример реального максимального числа потоков и
достигаемой при этом производительности кодирования при QP 23, четырех V4L2-буферов
output-интерфейса, четырех V4L2-буферов capture-интерфейса, размере CMA-памяти 128 МБ и частоте
VPU 312 МГц:- 1920x1072 — 4 потока, ~15 FPS;
- 1280x720 — 6 потоков, ~22 FPS;
- 640x480 — 19 потоков, ~18 FPS.
Пример ограничения числа потоков кодирования для обеспечения производительности кодирования ~30 FPS при QP 23, четырех V4L2-буферов output-интерфейса, четырех V4L2-буферов capture-интерфейса, размере CMA-памяти 128 МБ и частоте VPU 312 МГц:
- 1920x1072 — 2 потока, ~30 FPS;
- 1280x720 — 4 потока, ~30 FPS;
- 640x480 — 12 потоков, ~30 FPS.
Поддержка сжатия с постоянным битрейтом с помощью контролов:
- V4L2_CID_MPEG_VIDEO_FRAME_RC_ENABLE — включение/выключение контроля битрейта;
- V4L2_CID_MPEG_VIDEO_BITRATE — битрейт, бит/с.
Контроль битрейта будет выключен, если число кадров в GOP меньше трёх.
Особенности очереди capture:
- Поддерживаются буферы типов DMABUF и MMAP.
- Буферы должны быть физически непрерывными.
- Буферы типа MMAP выделяются драйвером с помощью CMA и являются физически непрерывными и некешируемыми.
Особенности очереди output:
- Поддерживаются буферы типов DMABUF, MMAP и USERPTR.
- Буферы типов DMABUF и MMAP должны быть физически непрерывными.
- Буферы типа MMAP выделяются драйвером с помощью CMA и являются физически непрерывными и некешируемыми.
- Если буферы типа USERPTR не являются физически непрерывными, выполняется копирование данных из них в непрерывную память с помощью DMA. Это снижает производительность кодирования.
Декодирование видео¶
- Поддерживается выходное несжатое видео с форматом пикселей M420.
- Поддержка декодирования видео с разрешением до 1920x1072 кратным 16 по ширине и высоте.
- Поддержка контрола V4L2_CID_MPEG_VIDEO_GOP_SIZE.
- Поддержка события V4L2_EVENT_SRC_CH_RESOLUTION при смене разрешения видео (в т.ч. в начальный момент момент времени, когда разрешение видео неизвестно, см. Memory-to-Memory Stateful Video Decoder Interface).
- Особенности очередей capture и output:
- Поддерживаются буферы типов DMABUF и MMAP.
- Буферы должны быть физически непрерывными.
- Буферы типа MMAP выделяются драйвером с помощью CMA и являются физически непрерывными и некешируемыми.
Ограничения драйвера¶
- Поддерживается только один аппаратный поток кодирования и один аппаратный поток декодирования.
- Несжатое видео имеет нестандартный формат пикселей (M420).
- Шаг между яркостными и/или цветовыми строками должен быть кратен 16 байтам.
- Для кодирования требуется 180 КиБ памяти XYRAM.
- Использование с драйвером delcore30m невозможно, т.к. драйвер avico использует SDMA через API DMA-engine, драйвер delcore30m — непосредственное управление SDMA.
- Поддерживается только контроль битрейта в режиме CBR. Контроль битрейта реализован на базе алгоритма, описанного в JVT-G012 и JVT-K049, только частично: при вычислении целевого параметра квантования для P-кадров не учитывается средняя абсолютная разница (MAD) кадра и его прогноза, т.к. VPU не предоставляет доступ к значению MAD, вычисляемому им на этапе оптимизации R-D. MAD может быть вычислен программно, но предполагается, что это повлечет значительное снижение производительности, поэтому вместо модели R-D, описанной в JVT-G012 и JVT-K049, используется модель R-D, описанная в Контроль битрейта при кодировании. Контроль битрейта возможен только при количестве кадров в GOP, равном 3 и более.
- Нет возможности менять FPS в процессе кодирования.
- Для декодирования требуется выделенная память в двух контроллерах DDR (по 8 МиБ в каждом DDR для поддержки разрешения 1920x1072).
- При декодировании сжатый кадр должен быть целиком расположен в одном output-буфере.
При кодировании для обхода проблемы rf#1382 драйвер использует промежуточные буферы в XYRAM для восстановленных и сжатых данных. Всего используется 4 буфера по 45 КиБ (строка макроблоков для кадра шириной 1920 пикселей в формате M420) — 2 буфера для восстановленных данных и 2 для сжатых. В результате реализации обхода проблемы, максимальная ширина кадров ограничилась 1920 пикселями.
При кодировании после каждой строки макроблоков VPU останавливается и драйвер выполняет следующие действия:
- Настраивает VPU на другой промежуточный буфер.
- Запускает SDMA для копирования данных из промежуточного буфера в DDR.
- Запускает VPU на обработку следующей строки макроблоков.
При кодировании для обхода проблемы rf#2003 в обработчике прерывания используется задержка, состоящая из следующих действий:
- Ожидание завершения чтения очередных данных исходного и референсного кадров.
- Ожидание завершения 80-кратного чтения регистра EVENTS.
- Ожидание снятия всех флагов регистра EVENTS, указывающих на текущую работу VDMA.
При декодировании для обхода проблемы зависания rf#1382 драйвер в начале декодирования выделяет буферы DDRx и DDRy в разных DDR, затем каждый кадр выполняет следующие действия:
- Копирование входных сжатых данных из буфера пользователя в буфер DDRx с помощью SDMA. DDRx — буфер, в котором находится референсный кадр.
- Копирование в VRAM первых двух строк макроблоков из буфера референсного кадра. Данное копирование стало необходимым после перемещения восстановленного кадра в отдельный буфер из общего буфера для референсного/восстановленного кадра. Восстановленный кадр теперь записывается в буфер DDRy.
- Запуск декодирования, при этом референсный кадр и сжатые данные считываются из DDRx, а восстановленный кадр записывается в DDRy.
- Выгрузка последней строки макроблоков из VRAM в буфер восстановленного кадра.
- Копирование полученного в результате декодирования восстановленного кадра из DDRy в буфер пользователя с помощью SDMA.
- Буферы DDRx и DDRy меняются местами, так что восстановленный кадр в DDRy используется как референсный кадр в DDRx для следующего кадра.
Использование драйвера¶
При инициализации аппаратного блока драйвер регистрирует два устройства V4L2:
- index = 0 — для кодирования,
- index = 1 — для декодирования.
В дистрибутиве Buildroot для устройств создаются символические ссылки в директории
/dev/v4l/by-path:
# ls -l /dev/v4l/by-path/*codec*
lrwxrwxrwx ... /dev/v4l/by-path/platform-37100000.codec-video-index0 -> ../../video0
lrwxrwxrwx ... /dev/v4l/by-path/platform-37100000.codec-video-index1 -> ../../video1
Контроль битрейта при кодировании¶
Контроль битрейта основан на алгоритме, описанном в JVT-G012 и JVT-K049.
Битрейт контролируется на уровне GOP и на уровне кадра. В задачи контроля битрейта входит вычисление параметра квантования, так чтобы средний битрейт видео соответствовал заданному значению.
В последующем описании используются следующие обозначения:
 — частота кадров (предполагается, что не меняется в процессе кодирования);
— частота кадров (предполагается, что не меняется в процессе кодирования); — ширина кадра в пикселях;
— ширина кадра в пикселях; — высота кадра в пикселях;
— высота кадра в пикселях; — номер GOP;
— номер GOP; — номер кадра в пределах GOP;
— номер кадра в пределах GOP; — количество кадров в i-ом GOP;
— количество кадров в i-ом GOP; — размер j-го сжатого кадра в i-ом GOP;
— размер j-го сжатого кадра в i-ом GOP; — число бит, оставщихся в GOP, на момент кодирования j-го кадра в i-ом GOP;
— число бит, оставщихся в GOP, на момент кодирования j-го кадра в i-ом GOP; — параметр квантования j-го кадра в i-ом GOP;
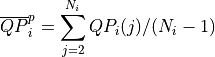
— параметр квантования j-го кадра в i-ом GOP; — усредненный параметр квантования по всем P-кадрам в i-ом GOP;
— усредненный параметр квантования по всем P-кадрам в i-ом GOP; — целевой битрейт на момент кодирования j-го кадра в i-ом GOP;
— целевой битрейт на момент кодирования j-го кадра в i-ом GOP; — целевой уровень виртуального буфера (число оставшихся бит) после кодирования
j-го карда в i-ом GOP;
— целевой уровень виртуального буфера (число оставшихся бит) после кодирования
j-го карда в i-ом GOP; — уровень заполнения виртуального буфера сжатых кадров (число бит в буфере
сжатых кадров гипотетического референсного декодера) на момент кодирования j-го кадра в i-ом GOP;
— уровень заполнения виртуального буфера сжатых кадров (число бит в буфере
сжатых кадров гипотетического референсного декодера) на момент кодирования j-го кадра в i-ом GOP; — целевое число бит на пиксель.
— целевое число бит на пиксель.
Описание алгоритма¶
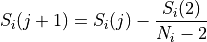
Общее число бит для оставшихся кадров в GOP в случае сжатия с константным битрейтом вычисляется по формуле:

Уровень заполнения виртуального буфера вычисляется по формуле:
Для первого карда первого GOP значение параметра квантования выбирается на основе целевого числа бит на пиксель по формуле:
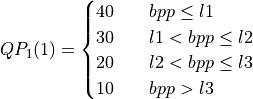
Рекомендуемые значения:
 — для кадров размером QCIF/CIF;
— для кадров размером QCIF/CIF; — для кадров больше QCIF/CIF.
— для кадров больше QCIF/CIF.
Для последующих GOP:

Полученное значение параметра квантования корректируется по формуле:

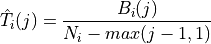
Перед вычислением параметра квантования P-кадров вычисляется целевой размер P-кадра.
Целевой размер P-кадра зависит от целевого уровня виртуального буфера. Целевой уровень виртуального буфера определяется для каждого P-кадра согласно размерам первого IDR-кадра и первого P-кадра.
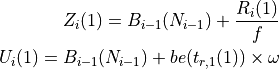
После кодирования первого P-кадра в i-ом GOP начальное значение целевого уровня виртуального буфера устанавливается по формуле:

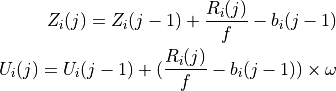
Целевой уровень виртуального буфера для последующих P-кадров вычисляется по формуле:
Размер, выделяемый для j-го P-кадра в i-ом GOP, вычисляется на основе целевого уровня виртуального буфера, частоты кадров, целевого битрейта и реального уровня заполненения виртуального буфера по формуле:

где  — константа, равная 0.5.
— константа, равная 0.5.
При вычислении целевого размера кадра также следует учесть число оставшихся бит в GOP для кадра, которое вычисляется по формуле:
Целевой размер P-кадра — взвешенная комбинация  и
и  , которая
вычисляется по формуле:
, которая
вычисляется по формуле:

где  — константа, равная 0.5.
— константа, равная 0.5.
Для совместимости с гипотетическим референсным декодером целевой размер P-кадра должен также ограничиваться согласно Совместимость с гипотетическим референсным декодером.
В JVT-K049 и JVT-G012 целевой параметр квантования вычисляется на основе квадратичной модели R-D, в которой используется средняя абсолютная разница [1] (MAD) текущего базового элемента (кадр, макроблок или слайс) и его прогноза, полученного на этапе оптимизации R-D. VPU не предоставляет значение MAD для кадра, поэтому вычисление целевого параметра квантования выполняется другим методом.
| [1] | MAD для текущего базового элемента вычисляется на основе линейной модели прогнозирования, в которой используется действительный MAD предыдущего базового элемента. |
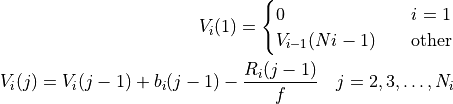
Согласно Rate-Distortion Analysis for H.264/AVC Video Coding and its Application to Rate Control увеличение параметра квантования на единицу приводит к уменьшению битрейта на ~12.5%, таким образом целевой параметр квантования QP может быть вычислен из формулы:

где T — целевой размер кадра,  — размер кадра, полученный при значении
— размер кадра, полученный при значении
 параметра квантования,
параметра квантования,  — коэффициенты, начальные значения которых
соответственно равны 1 и 0. Коэффициенты обновляются после кодирования каждого кадра согласно
методу наименьших квадратов.
— коэффициенты, начальные значения которых
соответственно равны 1 и 0. Коэффициенты обновляются после кодирования каждого кадра согласно
методу наименьших квадратов.
Данный метод требует двух проходов кодирования каждого кадра, т.к. сначала требуется вычислить размер кадра для заданного QP и в случае необходимости скорректировать QP и повторно выполнить кодирование. Для выполнения одного прохода кодирования предлагается прогнозировать размер текущего кадра для заданного QP на основе размера предыдущего P-кадра по формуле [2]:

| [2] | Формула аналогична модели прогнозирования MAD, описанной в JVT-G012 и JVT-K049. |
где  и
и  — коэффициенты модели прогнозирования размера кадра,
— размер предыдущего кадра. Начальные значения коэффициентов соответственно равны 1 и 0.
Коэффициенты обновляются после кодирования каждого кадра согласно методу наименьших квадратов.
— коэффициенты модели прогнозирования размера кадра,
— размер предыдущего кадра. Начальные значения коэффициентов соответственно равны 1 и 0.
Коэффициенты обновляются после кодирования каждого кадра согласно методу наименьших квадратов.
Для предотвращения резкого изменения качества видео вычисленный параметр квантования корректируется по формуле:

Полученное значение параметра квантования ограничивается диапазоном [0; 51] и передается в VPU, который выполняет оптимизацию R-D согласно значению QP.
После завершения кодирования кадра значения коэффициентов  обновляются.
обновляются.
Примечание - В текущей реализации алгоритма контроля битрейта коэффициенты
всегда равны начальным значениям.
Совместимость с гипотетическим референсным декодером¶
Чтобы удовлетворять требованиям гипотетического референсного декодера целевой размер P-кадра
также ограничивается нижней границей ( ) и верхней границей (
) и верхней границей ( ) по
формуле:
) по
формуле:

Верхняя и нижняя границы инициализируются по формулам:
где  — число бит для оставшихся кадров в GOP с номером (i-1),
— число бит для оставшихся кадров в GOP с номером (i-1),
 ,
,  — константа, равная 0.9,
— константа, равная 0.9,  —
длительность удаления 1-го кадра из виртуального буфера,
—
длительность удаления 1-го кадра из виртуального буфера,  — размер
данных (в битах), эквивалентный длительности t с коэффициентом преобразования, равным битрейту.
— размер
данных (в битах), эквивалентный длительности t с коэффициентом преобразования, равным битрейту.
Последующие значения и вычисляются по формулам:
Примечание - Формулы для и , описанные выше, представлены в Adaptive
rate control for H.264.
Предполагается, что в JVT-K049 даны некорректные формулы и
(в формулах вместо размера предыдущего кадра используется размер текущего кадра, который не
может быть известен на данном этапе). В документе JVT-G012 целевой размер P-кадра не ограничивается
нижней и верхней границами, поэтому формулы и там отсутствуют.
Драйвер контроллера Ethernet arasan-gemac¶
Драйвер arasan-gemac управляет контроллером Ethernet Arasan GEMAC.
Драйвер реализует стандартный интерфейс network devices, описанный в
Documentation/networking/netdevices.txt.
Обработка RX-прерываний реализована с использованием интерфейса
NAPI.
Директория с исходным кодом драйвера — drivers/net/ethernet/arasan.
Драйвер поддерживает выполнение следующих операций из пространства пользователя:
- Установка скорости (10/100/1000 Мб/с);
- Установка дуплекса (full/half);
- Установка уровня сообщений драйвера;
- Установка MAC-адреса;
- Чтение регистров контроллера Ethernet Arasan GEMAC утилитой ethtool;
- Перезапуск автосогласования;
- Проверка физического подключения;
- Установка MTU кадра в диапазоне 68 – 3500 байт;
- Отключение фильтрации пакетов (Promiscuous mode);
- Включение приема всех multicast-пакетов (IFF_ALLMULTI);
- Поддерживается фильтрация unicast-пакетов по MAC-адресу и multicast-пакетов по hash-таблице.
Примечание
Включение promiscuous mode повышает нагрузку на CPU.
Драйвер не поддерживает:
- Управление паузой;
- Чтение и запись EEPROM;
- Wake-on-Lan;
- Управление объединением прерываний.
Подсистема управления энергопотреблением¶
Подсистема управления энергопотреблением Linux определяет модели управления энергопотреблением (подробнее см. Device Power Management Basics):
- System Sleep;
- Runtime Power Management.
Модель System Sleep¶
В модели System Sleep определены состояния сна (подробнее см. System Power Management Sleep States):
- Suspend-To-Idle (s2idle, freeze);
- Standby, Power-On Suspend (shallow, standby);
- Suspend-to-RAM (deep);
- Suspend-to-disk (disk).
Поддерживаемые состояния сна:
- Suspend-To-Idle;
- Power-On Suspend.
Для энергосбережения в состоянии Power-On Suspend используются свойства драйверов:
- поддержка приостановки (suspend) контроллера СнК в драйвере;
- поддержка приостановки (suspend) контроллера внешнего интерфейса (приёмопередатчик CAN, Ethernet PHY, и т.д.) в драйвере;
- поддержка CPU Hotplug (подробнее см. главу CPU Hotplug).
Поддержка приостановки реализована в драйверах контроллеров СнК:
- avico (невозможен переход в Power-On Suspend во время сжатия);
- delcore-30m;
- designware-i2c;
- designware-i2s;
- dw-apb-gpio;
- dw-apb-uart;
- dw-wdt;
- dwc2;
- sdhci-mcom02.
Поддержка приостановки реализована в драйверах контроллеров внешних интерфейсов модулей на базе СнК:
- bcm4329-fmac;
- mcp2515;
- ft313h.
Поддержка приостановки не реализована в драйверах контроллеров СнК:
- arasan-gemac;
- dw-apb-ssi;
- dw-apb-timer;
- mcom-pwm;
- mfbsp-i2s;
- nfc-v2p99;
- pl330;
- vinc;
- vpout-drm;
- vpoutfb.
Поддержка пробуждения (wakeup) реализована в драйверах:
- dw-apb-uart (подробнее см. Пример пробуждения по событию от UART);
- dw-apb-gpio;
- rtc-ds1307 (подробнее см. Пример пробуждения по событию от RTC).
Пример пробуждения по событию от UART¶
Установить UART0 в качестве источника пробуждения:
echo enabled > /sys/devices/platform/38028000.serial/tty/ttyS0/power/wakeup
Перевести ОС в состояние сна:
echo freeze > /sys/power/state # enter Suspend-To-Idle state
или:
echo standby > /sys/power/state # enter Power-On Suspend state
В терминале на ПЭВМ отправить любой символ в приёмник контроллера UART0.
Пример пробуждения по событию от RTC¶
Перевести ОС в состояние сна до указанного времени пробуждения:
rtcwake -s 3 -m freeze # enter Suspend-To-Idle state
или:
rtcwake -s 3 -m standby # enter Power-On Suspend state
Модель Runtime Power Management¶
Для поддержки динамического управления энергопотреблением реализованы:
- механизм CPU hotplug;
- драйвер управления частотой ядер CPU cpufreq-dt.
Механизм CPU hotplug¶
Механизм CPU hotplug позволяет включать и выключать процессорные ядра, не перезагружая систему, что может использоваться:
- для отключения CPU1;
- для перехода системы в состояния сна.
Для выключения и включения процессорных ядер используются функции cpu_down() и cpu_up(),
описанные в файле kernel/cpu.c.
Использование через sysfs:
Для отключения питания ядра CPU1 необходимо выполнить:
echo 0 > /sys/devices/system/cpu/cpu1/online
Для включения питания ядра CPU1 необходимо выполнить:
echo 1 > /sys/devices/system/cpu/cpu1/online
Драйвер управления частотой ядер CPU cpufreq-dt¶
Штатный драйвер cpufreq-dt, позволяет управлять тактовой частотой ядер CPU0 и CPU1 через подсистему CPUfreq.
Директория с исходным кодом драйвера — drivers/cpufreq.
Список частот ядер CPU описан в DTS-файле mcom02.dtsi.
Описание DTS bindings представлено в файле
Documentation/devicetree/bindings/cpufreq/cpufreq-dt.txt.
Возможности драйвера:
- Регуляторы масштабирования тактовой частоты ядер CPU (CPUfreq governors):
ondemand(по-умолчанию) — устанавливает тактовую частоту в зависимости от нагрузки на ядрах CPU;conservative— похож наondemand, но более экономный (предпочтение отдаётся меньшим тактовым частотам);performance— устанавливает тактовую частоту в максимальное значение;userspace— позволяет устанавливать частоту из пространства пользователя.
- Управление регуляторами и частотами через
sysfs.
Ограничения драйвера:
- Не поддерживается управление напряжением питания ядер CPU, т.к отсутствует поддержка в СнК.
- Не поддерживается независимое управление частотой ядер CPU, т.к отсутствует поддержка в СнК.
Для установки тактовой частоты ядер из пространства пользователя необходимо:
Выбрать регулятор
userspace:echo userspace > /sys/devices/system/cpu/cpu0/cpufreq/scaling_governor
Выбрать частоту из поддерживаемых. Список частот доступен в файле
/sys/devices/system/cpu/cpu0/cpufreq/scaling_available_frequencies.Установить частоту. Значение частоты передаётся в кГц, например:
echo 312000 > /sys/devices/system/cpu/cpu0/cpufreq/scaling_setspeed
Подсистема UART в режиме RS-485¶
Для управления полудуплексными приёмопередатчиками RS-485 используются ioctl TIOCMBIS/TIOCMBIC:
int rts_flag = TIOCM_RTS;
ioctl(fd, TIOCMBIS, &rts_flag); // set send mode
ioctl(fd, TIOCMBIC, &rts_flag); // set receive mode
Примечание: модули Салют-ЭЛ24ОМ1 имеют полудуплексный приёмопередатчик RS-485.
Модуль dmatestcontig для тестирования SDMA¶
Модуль dmatestcontig не входит в состав исходных кодов Linux. Описание относится к модулю
dmatestcontig из коммита 4896f90a4cd335d91f5b9f2c1457f24baa7f98ce в репозитории модуля.
Модуль dmatestcontig основан на модуле
dmatest из коммита
9da2b1641a098eb9b00aacbfd7715efb6a503f7b в репозитории ядра Linux.
Модуль dmatestcontig позволяет провести тестирование SDMA с передачей данных, измерением производительности и проверкой правильности переданных данных. Управление SDMA осуществляется через DMA Engine API. Поддерживаемые типы передач: DMA_MEMCPY, DMA_XOR, DMA_PQ. Модуль поддерживает ряд параметров, которые позволяют задать размер буферов, количество повторений передач, максимальное число используемых каналов SDMA, количество потоков ядра, использующих канал SDMA, и др. Особенностью модуля dmatestcontig является то, что он позволяет выбрать типы передач, указывать специфические регионы памяти и включать частоты, которые, например, могут быть необходимы для обеспечения доступа к устройству памяти.
Модуль поддерживает все параметры, которые имеет модуль dmatest, а также добавляет параметры:
tests— типы выполняемых передач данных (по умолчанию выбраны все поддерживаемые типы передач);memregs— базовые адреса зарезервированных регионов памяти в DTS, в которые каналы SDMA должны адресовать запросы чтения/записи (по умолчанию регион выбирается автоматически);src— регионы памяти изmemregs, в которые каналы SDMA будут адресовать запросы чтения (по умолчанию первый регион, указанный вmemregs);dst— регионы памяти изmemregs, в которые каналы SDMA будут адресовать запросы записи (по умолчанию первый регион, указанный вmemregs);clocks— наименования узлов устройств в DTS, описывающих частоты, которых нужно включить, например, для обеспечения доступа SDMA к устройству памяти.
Параметр tests содержит битовую маску типов передач. Значение 1 бита включает тип передачи и
наоборот. Соответствие типов передач и номеров бит в параметре:
- бит 0 — DMA_MEMCPY;
- бит 1 — DMA_XOR;
- бит 2 — DMA_PQ.
Резервирование регионов памяти в DTS выполняется согласно Reserved memory regions. Пример резервирования регионов памяти для модулей Салют-ЭЛ24ПМ:
reserved-memory {
#address-cells = <1>;
#size-cells = <1>;
ranges;
dmatestc_ddr0_reserved: dmatestc_ddr0@0x7f800000 {
no-map;
reg = <0x7f800000 0x800000>;
};
dmatestc_ddr1_reserved: dmatestc_ddr1@0xdf800000 {
no-map;
reg = <0xdf800000 0x800000>;
};
dmatestc_xyram_reserved: dmatestc_xyram@0x3a400000 {
no-map;
reg = <0x3a400000 0x40000>;
};
};
Элементы массивов src и dst ссылаются на регионы памяти по индексу региона в массиве
memregs. Номер канала SDMA, с которым ассоциируется регион, определяется индексом элемента в
src/dst.
Пример загрузки модуля с параметрами tests, src и dst:
modprobe dmatestcontig wait=1 run=1 noverify=1 tests=0x01 \
max_channels=5 memregs=0x7f800000,0xdf800000,0x3a400000 \
src=2,2,0,1,1 dst=0,0,2,2,1
modprobe -r dmatestcontig
В примере выше пять каналов SDMA адресуют запросы чтения/записи в регионы памяти следующим образом:
- Канал 0: чтение из региона с базовым адресом 0x3a400000, запись в регион с адресом 0x7f800000.
- Канал 1: чтение из региона с базовым адресом 0x3a400000, запись в регион с адресом 0x7f800000.
- Канал 2: чтение из региона с базовым адресом 0x7f800000, запись в регион с адресом 0x3a400000.
- Канал 3: чтение из региона с базовым адресом 0xdf800000, запись в регион с адресом 0x3a400000.
- Канал 4: чтение из региона с базовым адресом 0xdf800000, запись в регион с адресом 0xdf800000.
Пример загрузки модуля с параметром clocks:
modprobe dmatestcontig run=1 noverify=1 memregs=0x7f800000,0x3a400000 \
src=0 dst=1 clocks="dsp_aclk"
modprobe -r dmatestcontig
В примере выше включается частота, описанная в узле устройства «dsp_aclk» в DTS, необходимая для обеспечения доступа к XYRAM.