Инструкция по захвату видео с последовательного сенсора на модулях на базе 1892ВМ14Я¶
О документе¶
Документ содержит указания по настройке модулей на базе 1892ВМ14Я (далее — “СнК”) для захвата и вывода в реальном времени следующих форматов видео:
- 720p 30 FPS для модулей Салют-ЭЛ24Д1 и Салют-ЭЛ24Д2;
- 1080p 30 FPS для модулей Салют-ЭЛ24ОМ1 с установленным Салют-ЭЛ24ПМ1 или Салют-ЭЛ24ПМ2.
Документ применим к отладочным модулям (далее — модулям) следующих ревизий:
- Салют-ЭЛ24Д1 r1.3;
- Салют-ЭЛ24Д1 r1.4;
- Салют-ЭЛ24Д1 r1.5;
- Салют-ЭЛ24Д2 r1.1;
- Салют-ЭЛ24ОМ1 r1.1 с установленным Салют-ЭЛ24ПМ1 r1.1 или Салют-ЭЛ24ПМ1 r1.2;
- Салют-ЭЛ24ОМ1 r1.2 с установленным Салют-ЭЛ24ПМ1 r1.2, Салют-ЭЛ24ПМ2 r1.0 или Салют-ЭЛ24ПМ2 r1.1.
Для модулей Салют-ЭЛ24Д1 и Салют-ЭЛ24Д2 захват видео выполняется с видеомодуля LINK OV2715 Rev 1.0, подключенного по последовательному интерфейсу MIPI CSI2 к соответствующему разъёму модуля.
Для модулей Салют-ЭЛ24ОМ1 захват видео выполняется с видеомодуля RPi Camera (B), подключенного по последовательному интерфейсу MIPI CSI2 к соответствующему разъёму модуля.
Варианты демонстрации захваченного видео:
- вывод видео на HDMI-монитор;
- RTSP-вещание на модуле, приём и вывод видео на ПЭВМ.
- передача видео по SpaceWire c одного модуля на другой, вывод видео на приёмном модуле.
- обработка на DSP и вывод видео на HDMI-монитор.
Для работы требуется прошивка SD/eMMC-карты, собранная из дистрибутива ОС GNU/Linux на базе Buildroot версии v3.1 для 1892ВМ14Я.
Состав стенда¶
Для захвата и вывода видео необходим стенд:
- Комплект модуля: модуль, блок питания, SD-карта.
- Видеомодуль LINK OV2715 (для модулей Салют-ЭЛ24Д1 и Салют-ЭЛ24Д2).
- Видеомодуль RPi Camera (B) (для модулей Салют-ЭЛ24ОМ1).
- Гибкий шлейф для подключения видеомодуля.
- HDMI-монитор.
- HDMI-кабель.
- Ethernet-кабель.
- ПЭВМ, удовлетворяющая требованиям:
- ПЭВМ должна удовлетворять требованиям из руководства программиста дистрибутива ОС GNU/Linux на базе Buildroot;
- ПЭВМ и модуль подключены к одной локальной Ethernet-сети.
Демонстрация передачи видео по SpaceWire выполняется на двух модулях Салют-ЭЛ24ОМ1 с установленным Салют-ЭЛ24ПМ2 (на модулях Салют-ЭЛ24Д1, Салют-ЭЛ24Д2 отсутствует разъём SpaceWire).
Для передачи видео по SpaceWire нужны дополнительно:
- Второй комплект модуля.
- Второй Ethernet-кабель.
- Кабель SpaceWire (входит в состав комплекта модуля Салют-ЭЛ24ОМ1).
Подготовка стенда¶
Для подготовки стенда к захвату видео с видеомодуля необходимо:
Прошить SD-карту прошивкой, собранной из дистрибутива.
Установить SD-карту в модуль.
Для модулей Салют-ЭЛ24ОМ1 настроить загрузку операционной системы из SD-карты согласно инструкции (данные действия не требуются, если прошивка eMMC-карты уже содержит дистрибутив ОС GNU/Linux на базе Buildroot версии v3.0 или выше):
Перейти в режим монитора U-Boot (см. документ “Загрузчик U-Boot для 1892ВМ14Я. Руководство программиста”).
Установить переключатель XP4 в положение uSDcard.
Выбрать загрузку ОС из SD-карты:
setenv mmcdev 1 saveenv boot
Подключить модуль к сети Ethernet-кабелем, используя соотвествующий разъем модуля.
Подключить видеомодуль к соответствующему разъёму модуля через гибкий шлейф:
- для Салют-ЭЛ24Д1 r1.3 — разъём XS1;
- для Салют-ЭЛ24Д1 r1.4 — разъём XS1;
- для Салют-ЭЛ24Д1 r1.5 — разъем XS1;
- для Салют-ЭЛ24Д2 r1.1 — разъём XS1;
- для Салют-ЭЛ24ОМ1 r1.1 — разъём XS9;
- для Салют-ЭЛ24ОМ1 r1.2 — разъём XS9.
Пример подключения видеомодуля к Салют-ЭЛ24Д2 r1.1 представлен на рисунке 6.
Пример подключения видеомодуля к Салют-ЭЛ24OM1 r1.2 представлен на рисунке 7.
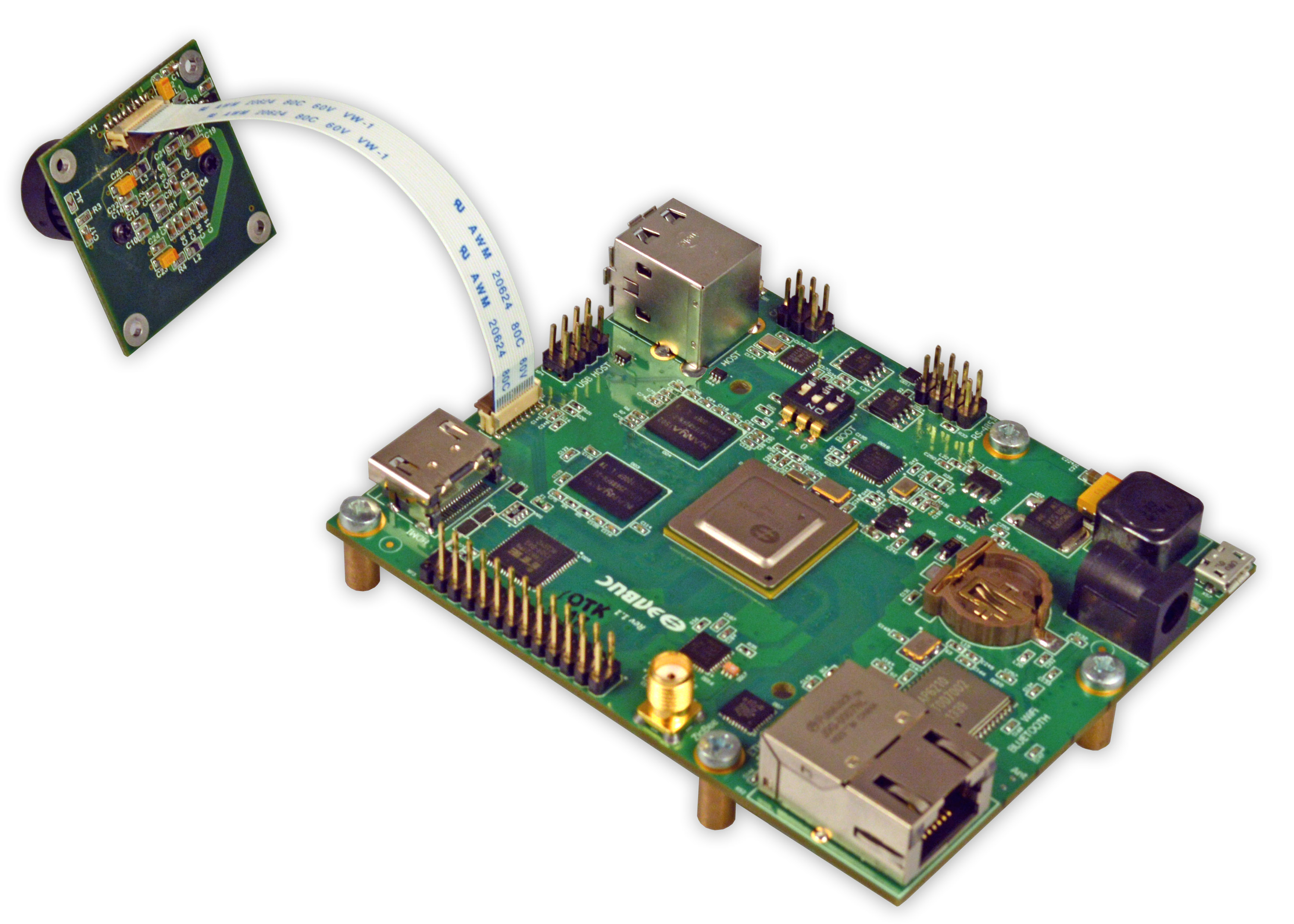
6 Пример подключения видеомодуля LINK OV2715 Rev 1.0 к модулю Салют-ЭЛ24Д2 r1.1
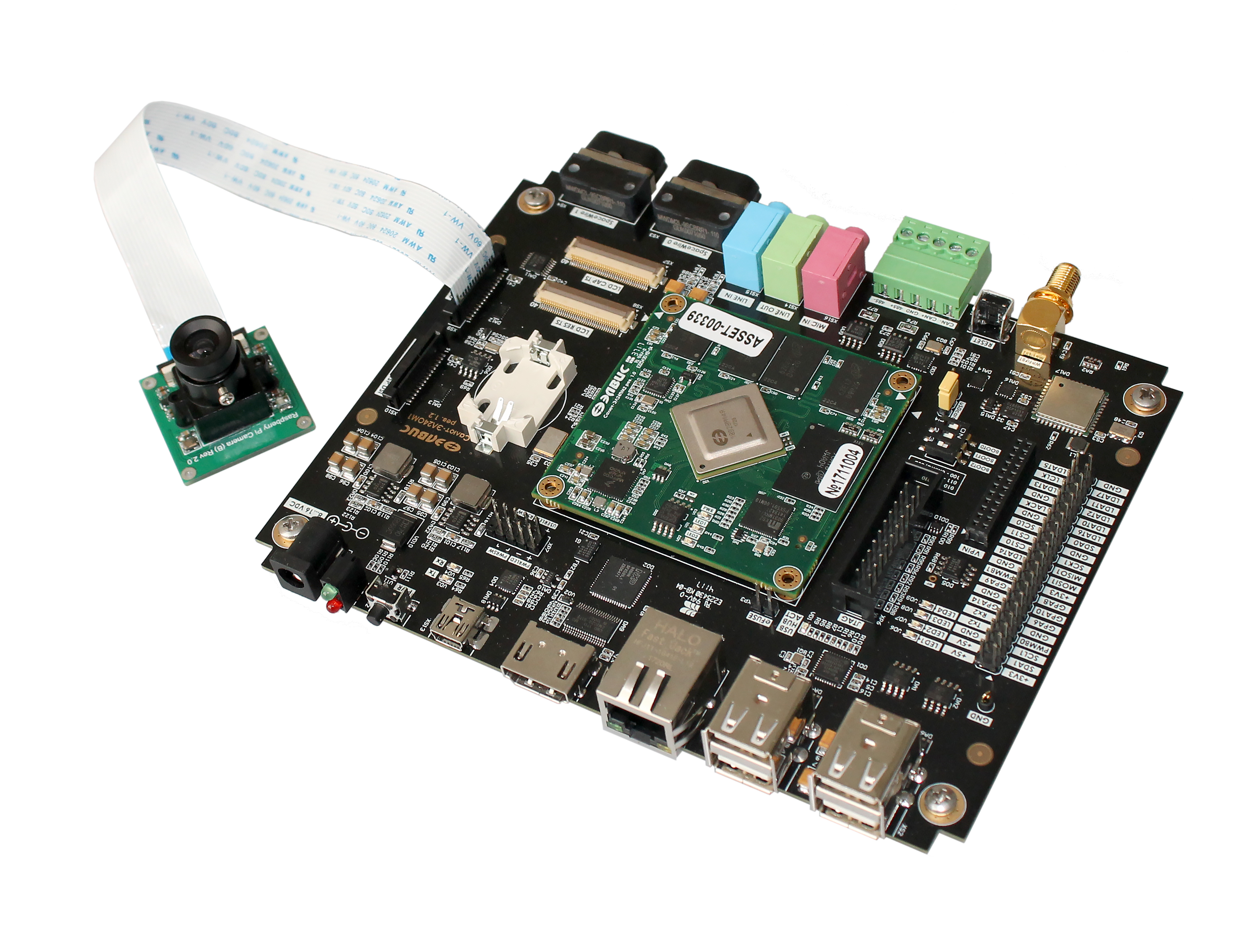
7 Пример подключения видеомодуля RPi Camera (B) к модулю Салют-ЭЛ24ОМ1 r1.2
Захват и вывод видео на HDMI-монитор¶
Последовательность действий¶
Для запуска демонстрации необходимо:
Подготовить модуль в соответствии с главой Подготовка стенда.
Подключить HDMI-монитор HDMI-кабелем к соответствующему разъёму модуля.
Подать питание на модуль.
На ПЭВМ открыть консоль, установить соединение по терминалу SSH с модулем.
Для модулей Салют-ЭЛ24Д1 и Салют-ЭЛ24Д2 на ПЭВМ в терминале SSH выполнить:
modprobe vpoutfb v4l2tofb -i 2 -w 1280 -h 720
Для модуля Салют-ЭЛ24ОМ1 на ПЭВМ в терминале SSH выполнить:
v4l2tofb -i 2 -w 1920 -h 1080
Наблюдать на экране HDMI-монитора, подключенного к модулю, видео, поступающее с видеомодуля.
Прервать исполнение программы, нажав
Ctrl-C.
Поясняющая информация¶
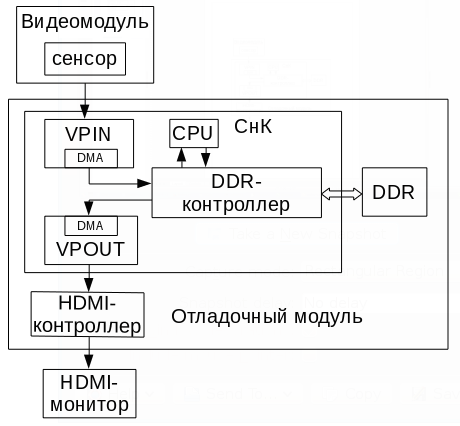
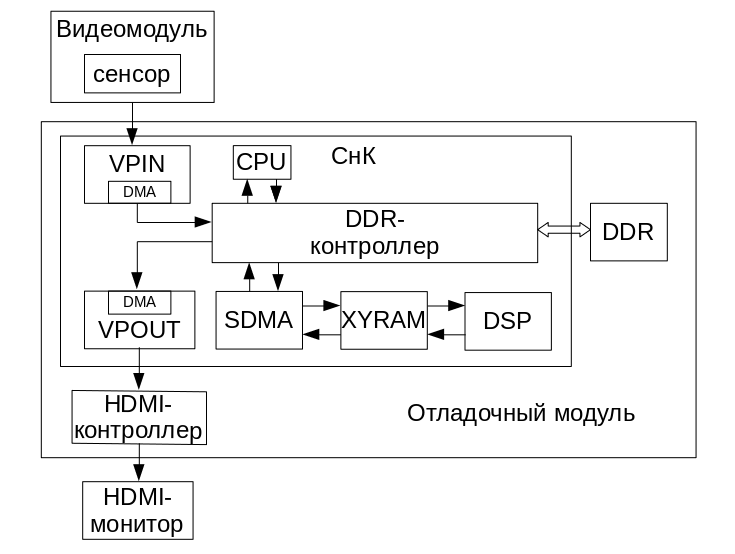
8 Диаграмма потоков видеокадров
Диаграмма потоков видеокадров представлена на рисунке 8. Захват видео с видеомодуля выполняет блок VPIN СнК. DMA блока VPIN записывает видеокадры в буфер видеоввода в ОЗУ DDR. CPU СнК копирует видеокадры из буфера видеоввода в буфер драйвера Frame buffer. DMA блока VPOUT СнК считывает видеокадры из буфера драйвера Frame buffer и выводит на параллельный порт подключенный к HDMI-контроллеру модуля.
В ОС Linux захват видео выполняется через драйвер VPIN, реализующий стандартный API интерфейс V4L2. Спецификация на драйвер находится в документе “Спецификация на драйвер V4L2 VINC блока ISP VPIN/VINC 1892ВМ14Я”.
Для модулей Салют-ЭЛ24Д1 и Салют-ЭЛ24Д2 по умолчанию драйвер VPOUT Frame buffer (vpoutfb) не загружается автоматически. Для загрузки драйвера на одну сессию (до перезагрузки ОС), необходимо выполнить:
modprobe vpoutfb
Процедура настройки автоматической загрузки драйвера описана в главе “Включение драйвера framebuffer vpoutfb” документа “Дистрибутив ОС GNU/Linux на базе Buildroot для 1892ВМ14Я. Руководство программиста”.
Для вывода видео на монитор используется утилита v4l2tofb.
Утилита открывает устройство соответсвующее входному интерфейсу, который задается ключом -i,
устанавливает формат
BGR32,
принимает кадры от VPIN и выводит их на Frame buffer.
Соответствие между значением ключа -i и выбираемым входным интерфейсом следующее: 0 - PInterface0; 1 - PInterface1; 2 - SInterface0(CSI0); 3 - SInterface1(CSI1).
Захват видео и RTSP-вещание¶
Последовательность действий¶
Для запуска RTSP-вещания видео необходимо:
Подготовить модуль в соответствии с главой Подготовка стенда.
Подать питание на модуль.
На ПЭВМ открыть консоль, установить соединение по терминалу SSH с модулем.
В терминале SSH выполнить:
cap-enc -s <res> -f1 /dev/v4l/by-path/platform-37200000.vinc-video-index0 \ /dev/v4l/by-path/platform-37100000.codec-video-index0 | \ gst-rtsp-test-launch 'fdsrc blocksize=4116480 do-timestamp=true ! \ video/x-h264,stream-format=byte-stream,alignment=nal ! \ rtph264pay name=pay0 mtu=65507'
где <res> — необходимо заменить на разрешение кадра. Для модулей Салют-ЭЛ24Д1 и Салют-ЭЛ24Д2 установить разрешение кадра 1280x720. Для модуля Салют-ЭЛ24ОМ1 установить разрешение кадра 1920x1072.
Для приема и вывода видео на монитор на ПЭВМ с использованием GStreamer необходимо в консоли ПЭВМ выполнить:
gst-launch-1.0 -v rtspsrc location=rtsp://<board-ip>:8554/test ! \ rtph264depay ! queue ! h264parse ! avdec_h264 ! xvimagesink sync=false
где <board-ip> — необходимо заменить на внешний сетевой адрес модуля.
Для приема и вывода видео на монитор на ПЭВМ с использованием FFmpeg необходимо в консоли ПЭВМ выполнить:
ffplay rtsp://<board-ip>:8554/test
Наблюдать на экране монитора, подключенного к ПЭВМ, видео, поступающее с видеомодуля.
Прервать исполнение программы, нажав
Ctrl-C.
Поясняющая информация¶
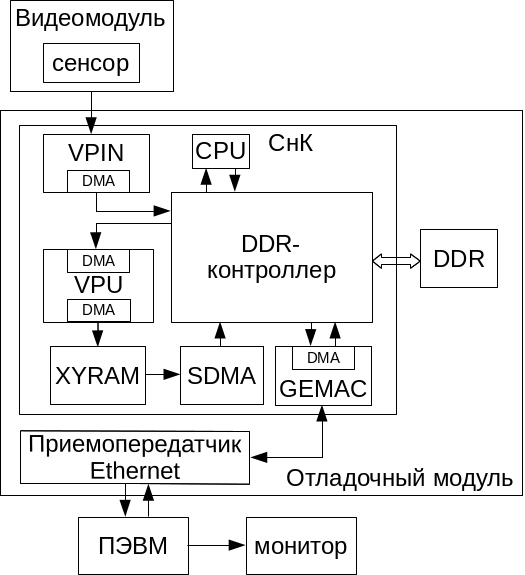
9 Диаграмма потоков видеокадров
Диаграмма потоков видеокадров представлена на рисунке 9. Захват видео с видеомодуля выполняет блок VPIN СнК. DMA блока VPIN записывает видеокадры в буфер видеоввода в ОЗУ DDR. Сжатие видео в соответствии со стандартом H.264 (Constrained Base line Profile) выполняет блок VPU СнК. DMA блока VPU записывает исходные видеокадры в буфер в памяти VRAM СнК, а сжатые данные — в буфер в памяти XYRAM СнК. Блок SDMA СнК копирует сжатые данные из буфера в памяти XYRAM в буфер в ОЗУ DDR. CPU СнК передает данные в блок GEMAC СнК, который отправляет их в приемопередатчик Ethernet, соединенный с ПЭВМ. ПЭВМ принимает видео, декодирует его и выводит на монитор.
В ОС Linux захват видео выполняется через драйвер VPIN, реализующий стандартный API интерфейс V4L2. Спецификация на драйвер находится в документе “Спецификация на драйвер V4L2 VINC блока ISP VPIN/VINC 1892ВМ14Я”. Сжатие видео выполняется через драйвер VPU, реализующий стандартный API интерфейс V4L2. Описание драйвера находится в документе “Ядро Linux для 1892ВМ14Я. Руководство системного программиста”.
Для захвата и сжатия видео в соответствии со стандартом H.264 используется утилита cap-enc.
Утилита открывает устройство, соответствующее видеомодулю, и устройство, соответствующее VPU,
устанавливает формат
M420,
принимает кадры от VPIN, передает их VPU, принимает сжатые данные от VPU и записывает их в
стандартный вывод.
Примечание
Утилита cap-enc позволяет установить контролы V4L2 драйвера VPU с помощью опции -c.
Для RTSP-вещания используется утилита gst-rtsp-test-launch (GStreamer).
Утилита с помощью элемента fdsrc считывает данные из стандартного ввода в буферы GStreamer,
преобразовывает буферы GStreamer в пакеты RTP с помощью элемента rtph264pay и реализует работу
RTSP-сервера с помощью библиотеки gst-rtsp-server GStreamer.
Примечание
В представленной команде временные метки буферов устанавливаются элементом fdsrc в момент получения буфера, а не в момент считывания изображения сенсором.
Свойство blocksize элемента fdsrc должно иметь значение, равное размеру capture-буфера, который вычисляется по следующей формуле:

где W — ширина кадра, H — высота кадра. Например, при разрешении 1920x1072 размер capture-буфера равен 4116480 байт, следовательно, свойство blocksize элемента fdsrc необходимо установить в значение 4116480.
Примечание
gst-rtsp-test-launch по умолчанию использует RTSP-порт 8554. Другой порт может быть
задан с помощью опции -p.
Прием, декодирование и вывод видео на монитор на ПЭВМ выполняется с использованием GStreamer или FFmpeg.
Примечание
При использовании GStreamer протокол передачи может быть задан с помощью свойства protocols элемента rtspsrc, например:
protocols="tcp+udp-mcast+udp"
GStreamer будет пытаться использовать протоколы в следующем порядке: UDP, unicast/UDP, multicast/TCP. Данный порядок не может быть переопределен.
При использовании FFmpeg протокол передачи может быть задан с помощью опции -rtsp_transport, например:
-rtsp_transport tcp+udp_multicast+udp
Стабильность декодирования на ПЭВМ может зависеть от используемых версий FFmpeg и GStreamer, драйверов аппаратного декодера или производительности CPU (при программном декодировании).
В случае потери одного пакета при передаче по UDP, на приёмнике становится невозможно восстановить все P-кадры до следующего I-кадра. В этом случае декодер может либо воспроизводить испорченные кадры или показывать последний неиспорченный кадр до приёма следующего I-кадра, поэтому рекомендуется использовать передачу по TCP.
Передача видео по SpaceWire¶
Последовательность действий¶
Для запуска передачи видео по SpaceWire необходимо:
Подготовить модуль-передатчик в соответствии с главой Подготовка стенда.
Подготовить модуль-приёмник в соответствии с главой Подготовка стенда пункты 1-4.
Подключить HDMI-монитор HDMI-кабелем к соответствующему разъёму модуля-приёмника.
Соединить модули кабелем SpaceWire, используя гнёзда XS3 на обоих модулях.
Подать питание на модули.
На ПЭВМ открыть две консоли, установить соединение по терминалу SSH или UART с модулями.
В терминале SSH модуля-передатчика выполнить запуск systemd-сервиса:
systemctl start spacewire-video-transmit
В терминале SSH модуля-приёмника выполнить запуск systemd-сервиса:
systemctl start spacewire-video-receive
Наблюдать на экране HDMI-монитора видео, поступающее с видеомодуля, подключенного к модулю-передатчику.
Прервать исполнение программы, выполнив остановку systemd-сервисов в терминале SSH модуля-передатчика:
systemctl stop spacewire-video-transmit
и в терминале SSH модуля-приёмника:
systemctl stop spacewire-video-receive
Поясняющая информация¶
В ОС Linux захват видео выполняется через драйвер VPIN, реализующий стандартный API интерфейс V4L2. Спецификация на драйвер находится в документе “Спецификация на драйвер V4L2 VINC блока ISP VPIN/VINC 1892ВМ14Я”. Сжатие видео выполняется через драйвер VPU, реализующий стандартный API интерфейс V4L2. Описание драйвера находится в документе “Ядро Linux для 1892ВМ14Я. Руководство системного программиста”.
Для захвата и сжатия видео в соответствии со стандартом H.264 используется утилита cap-enc.
Утилита открывает устройство, соответствующее видеомодулю, и устройство, соответствующее VPU,
устанавливает формат
M420,
принимает кадры от VPIN, передает их VPU, принимает сжатые данные от VPU и записывает их в
стандартный вывод. Стандартный вывод перенаправляется на вход утилиты swic-xfer, которая
посредством использования Linux драйвера контроллера SpaceWire передаёт данные на модуль-приёмник
по кабелю SpaceWire.
На модуле-приёмнике отключается бланкирование консоли. Данные, поступающие от модуля-передатчика по
кабелю SpaceWire, читаются утилитой swic-xfer и записываются в стандартный вывод.
Стандартный вывод перенаправляется на вход утилиты ffmpeg, которая выводит видеопоток на
HDMI-монитор.
Захват, обработка на DSP и вывод видео на HDMI-монитор¶
Последовательность действий¶
Примечание
Демонстрация может быть запущена только на модуле Салют-ЭЛ24ОМ с установленным Салют-ЭЛ24ПМ.
Для вывода видео на монитор необходимо:
Подготовить модуль в соответствии с главой Подготовка стенда.
Подключить HDMI-монитор HDMI-кабелем к соответствующему разъёму модуля.
Подать питание на модуль.
На ПЭВМ открыть консоль, установить соединение по терминалу SSH с модулем.
Загрузить модуль драйвера delcore30m. Для этого в терминале SSH выполнить:
modprobe -r avico echo -n "37220000.dma" > /sys/bus/amba/drivers/dma-pl330/unbind modprobe -r delcore30m modprobe delcore30m
Для запуска демонстрации инверсии в терминале SSH выполнить:
delcore30m-inversiondemo -i 2
или запустить демонстрацию детектора движения:
delcore30m-dspdetector -i 2
Наблюдать на экране HDMI-монитора, подключенного к модулю, обработанное видео, поступающее с видеомодуля.
Прервать исполнение программы, нажав
Ctrl-C.
Поясняющая информация¶
10 Диаграмма потоков видеокадров
Диаграмма потоков видеокадров представлена на рисунке 10.
Перемещения видеокадров осуществляются с помощью утилит инверсиии видеокадров delcore30m-inversiondemo,
детекции движения delcore30m-dspdetector, а также драйверов DSP, VPIN и DRM.
Захват видео с видеомодуля выполняет блок VPIN СнК. DMA блока VPIN записывает видеокадры в буфер
видеоввода в ОЗУ DDR.
Блок SDMA СнК копирует видеокадр из буфера в памяти DDR в буфер памяти XYRAM.
DSP СнК обрабатывает данные, записывая результат обработки в буфер памяти XYRAM, который
копируется блоком SDMA СнК в буфер памяти DDR, соответствущий Frame buffer.
DMA блока VPOUT СнК считывает видеокадры из буфера драйвера Frame buffer и выводит на
параллельный порт подключенный к HDMI-контроллеру модуля.
Утилиты delcore30m-inversiondemo и delcore30m-dspdetector выполняют следующие действия:
Открывают устройство драйвера VINC, соответствующее входному интерфейсу, который задается ключом -i и выполняют следующие действия:
- Устанавливают формат BGR32.
- Устанавливают файловые дескрипторы буферов, в которые будут сохраняться кадры от VPIN.
Спецификация на драйвер VINC находится в документе “Драйвер V4L2 vinc ISP VPIN/VINC 1892ВМ14Я. Руководство программиста”.
Значение ключа i может принимать следующие значения:
0— PInterface0;1— PInterface1;2— SInterface0(CSI0);3— SInterface1(CSI1).
Открывают устройство драйвера delcore30m и выполняют следующие действия:
- Выделяют ресурсы DSP и SDMA.
- Загружают исполняемый код DSP.
- Выделяют буфера памяти и загружает необходимые данные.
- Разбивают очередной видеокадр на тайлы.
- Настраивают цепочку SDMA.
- Создают задание для DSP.
- Запускают задание на DSP.
- Ожидают завершения задания на DSP.
Спецификация на драйвер delcore30m находится в документе “Драйвер delcore30m. Руководство программиста”.
Открывают устройство драйвера DRM и выполняют следующие действия:
- Настраивают выходное разрешение.
- Экспортируют два кадровых буфера, откуда будут считываться кадры, обработанные на DSP.
Модуль драйвера delcore30m по умолчанию выгружен. Для загрузки модуля драйвера delcore30m на одну сессию (до перезагрузки ОС), необходимо заранее выгрузить драйвер pl330.